ruvnet/RuView는 처음 보면 꽤 자극적입니다.
WiFi만으로 자세 추정, 호흡/심박 감지, 점유 감지, 심지어 through-wall sensing까지 한다고 설명하기 때문입니다.
그런데 이 저장소는 그냥 노트북에 띄우면 다 되는 앱으로 보면 거의 반드시 오해가 생깁니다.
공식 README와 User Guide, 2026년 4월 릴리스 기록을 같이 보면 체험은 쉽지만, 진짜 성능은 하드웨어 전제라는 구조가 더 정확합니다.
결론부터 말하면
RuView는 메이커, 임베디드, WiFi CSI, 프라이버시 보존형 센싱에 관심 있는 사람에게는 꽤 흥미로운 프로젝트입니다.
반대로 일반 사용자가 “내 노트북 WiFi로 바로 사람 자세를 읽는다”고 기대하면 실망할 가능성이 큽니다.
핵심만 줄이면 이렇습니다.
Docker 데모는 당장 체험할 수 있습니다.일반 노트북 WiFi는 공식 문서상RSSI-only경로라서 대체로거친 존재/움직임 감지쪽입니다.- 저장소가 전면에 내세우는
pose,vitals,through-wall의 본체는ESP32-S3나 연구용 NIC 같은CSI-capable hardware가 있어야 합니다. - 프로젝트 자체도 README 첫머리에서
Beta Software라고 밝히고 있고, 2026년 4월 릴리스들에는 펌웨어 안정화 수정이 계속 올라왔습니다.
왜 이렇게 화제가 됐나
2026년 5월 7일 기준 GitHub API에서 ruvnet/RuView는 51,919 stars, 6,907 forks로 잡힙니다.
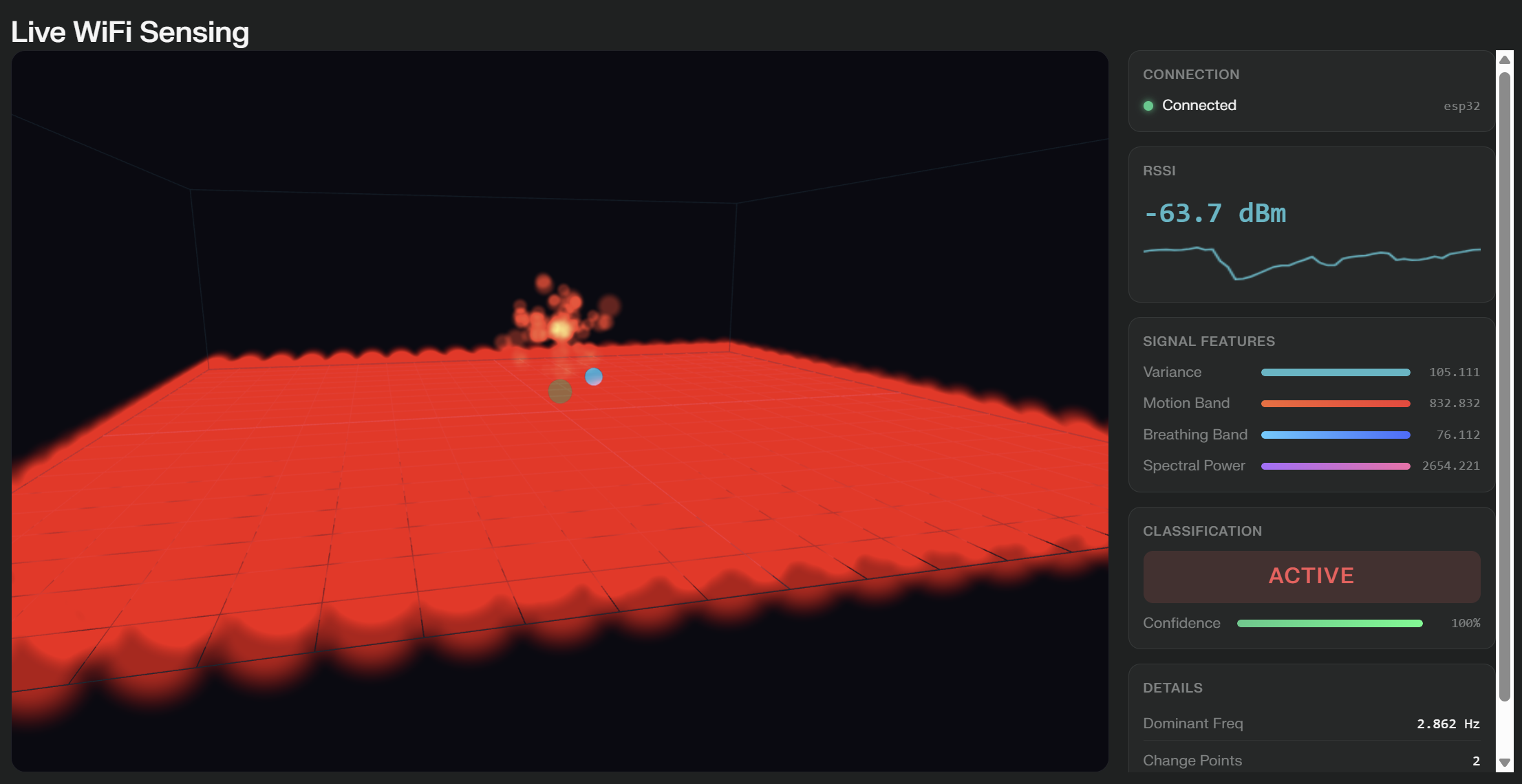
설명도 강합니다. GitHub 저장소 설명은 이 프로젝트를 commodity WiFi signals를 이용한 real-time spatial intelligence, vital sign monitoring, and presence detection 플랫폼으로 소개합니다.
여기에 README는 다음을 한꺼번에 밀고 있습니다.
- 카메라 없이 사람 존재와 자세를 본다
- 호흡과 심박을 비접촉으로 감지한다
- 벽 너머 존재 감지도 가능하다
- 엣지 하드웨어에서 돌고, 클라우드가 필요 없다
즉, AI + 센서 + 프라이버시 키워드가 다 들어가 있어서 관심을 끌기 쉬운 구조입니다.
먼저 헷갈리기 쉬운 지점: 데모 경로와 실측 경로가 다릅니다
RuView 공식 문서를 보면 설치/실행 경로가 세 층으로 나뉩니다.
| 체험 경로 | 필요한 것 | 공식 문서상 가능한 것 | 기대치 |
|---|---|---|---|
| Docker 시뮬레이션 | Docker만 있으면 됨 | 30초 데모, UI, API, synthetic CSI 파이프라인 확인 | 작동 구조 체험용에 가깝습니다. 실제 현장 감지 성능 검증과는 다릅니다. |
| 일반 노트북 WiFi | Windows/macOS/Linux 노트북 | RSSI 기반 존재 감지, 움직임 분류, 일부 거친 측정 | pose estimation의 본체가 아닙니다. 공식 FAQ도 소비자 WiFi 노트북은 pose estimation이 안 된다고 적습니다. |
| ESP32-S3 / 연구용 NIC | ESP32-S3 mesh 또는 Intel 5300/Atheros AR9580 등 | Full CSI 기반 pose, vital signs, through-wall sensing | 저장소가 내세우는 핵심 기능은 사실상 이 경로를 기준으로 봐야 합니다. |
여기서 중요한 건 노트북으로 되느냐 질문에 대한 답이 문서 안에서도 꽤 명확하다는 점입니다.
- User Guide는
Windows WiFi (RSSI Only)섹션을 따로 둡니다. - 같은 문서 FAQ는 소비자용 WiFi 노트북은
RSSI만 보이므로full pose estimation에는 부족하다고 적습니다. - Troubleshooting도
vital signs show 0 BPM항목에서vital sign detection requires CSI-capable hardware라고 다시 못 박습니다.
즉, 문서 전체를 종합하면 RSSI-only는 체험/보조 경로, 핵심 성능은 CSI 하드웨어 경로라고 읽는 편이 안전합니다.
이 문장은 공식 문서를 종합한 제 해석입니다.
공식 저장소가 실제로 내세우는 포인트
README 기준으로 RuView는 이런 그림을 그립니다.
ESP32-S3기반 저가 노드Cognitum Seed를 붙인 엣지 구성Docker로 돌려보는 빠른 데모17 COCO keypoints기반 pose 추정breathing,heart rate,presence,activity recognition- 필요 시
research NIC기반 CSI 수집
특히 README는 하드웨어 옵션도 가격대와 함께 공개합니다.
ESP32 + Cognitum Seed권장 구성: 약$140ESP32 Mesh: 약$54Research NIC: 약$50-100Any WiFi laptop:$0, 하지만RSSI-only
이건 오히려 장점입니다.
많은 저장소가 “되긴 된다”고만 말하는 반면, RuView는 무슨 하드웨어를 써야 하고 어느 경로가 어느 기능까지 되는지를 비교적 분리해서 적고 있습니다.
지금 시점에서 흥미로운 이유
1. 카메라 없는 센싱이라는 방향은 분명히 매력적입니다
README와 User Guide 모두 no cameras, no video, privacy-first를 강하게 밀고 있습니다.
특히 병실, 요양, 보안구역, 공장, 스마트홈처럼 카메라 설치가 민감한 공간에서는 이 방향이 분명히 매력적으로 보입니다.
2. 체험 진입장벽은 생각보다 낮습니다
User Guide는 Docker를 Recommended 경로로 두고, 30초 데모와 REST API 확인 절차까지 제공합니다.
즉 “설치가 아예 불가능한 연구 저장소”는 아닙니다.
3. 문서와 릴리스 흐름이 꽤 공격적입니다
README, User Guide, CHANGELOG, ADR 문서, GitHub Releases가 모두 활발합니다.
2026년 4월 6일에는 v0.7.0 모델 릴리스에서 92.9% PCK@20를 내세웠고, 2026년 4월 28일에는 v0.6.3-esp32 펌웨어 릴리스가 올라왔습니다.
즉 이 프로젝트는 멈춘 저장소라기보다 아주 빠르게 전진하는 실험/제품화 사이 단계에 더 가깝습니다.
그렇다고 바로 과신하면 안 되는 이유
1. 저장소 스스로도 Beta Software라고 밝힙니다
README 첫머리는 이 프로젝트가 Under active development이며 APIs and firmware may change라고 설명합니다.
또 single ESP32 deployments have limited spatial resolution, camera-free pose accuracy is limited 같은 제한도 같이 적어 둡니다.
즉, 운영진 스스로도 “이건 완성된 소비자 제품”이라고 말하고 있지는 않습니다.
2. 강한 성능 수치는 대부분 저장소/릴리스 기준 자기 보고입니다
예를 들어 공식 자료에는 이런 숫자들이 나옵니다.
92.9% PCK@20100% presence accuracy0.008 ms inference171K emb/s
이 수치들이 README, CHANGELOG, Releases에 분명히 적혀 있는 것은 사실입니다.
다만 이번 글에서는 외부 독립 검증까지 끝난 수치라고 보지는 않는 편이 맞다고 봅니다.
이건 “거짓이다”라는 뜻이 아니라, 공식 저장소 주장과 제3자 검증은 구분해서 봐야 한다는 뜻입니다.
3. 2026년 4월 릴리스만 봐도 펌웨어 안정화 수정이 많습니다
최근 릴리스 흐름은 프로젝트가 활발하다는 증거이기도 하지만, 동시에 아직 거칠다는 신호이기도 합니다.
v0.6.1-esp32는 multi-node에서node_id가 잘못 들어가는 문제를 고쳤다고 설명합니다.v0.6.2-esp32는 Timer Service stack overflow 수정이 핵심입니다.v0.6.3-esp32는 SPI flash cache crash와 defensive copy 수정이 중심입니다.
즉, 하드웨어 붙여서 오래 돌리는 경로는 지금도 꽤 빠르게 다듬어지는 중입니다.
4. 카메라가 없다고 프라이버시 이슈가 사라지는 건 아닙니다
User Guide FAQ도 이 점을 분명히 적습니다.
이미지나 비디오는 안 저장해도 human position, movement, vital signs를 다루면 여전히 개인정보와 규제 이슈가 생길 수 있습니다.
이건 꽤 중요한 포인트입니다.
카메라가 없으니 무조건 안전이 아니라수집하는 데이터 종류가 달라질 뿐, 여전히 민감할 수 있다
로 보는 편이 정확합니다.
그래서 누가 지금 봐야 하나
추천할 수 있는 사람
ESP32,edge AI,WiFi CSI에 관심 있는 메이커나 연구자- 카메라 없는 점유 감지/존재 감지 아이디어를 검토하는 팀
- 시뮬레이션 데모와 실제 CSI 하드웨어 경로를 구분해서 실험할 수 있는 사람
기대치를 낮춰야 하는 사람
- 일반 노트북만으로 바로
자세 추정이 될 거라 생각한 사람 - 완제품 수준의 안정성을 기대하는 사람
- 의료/보안 영역에서 즉시 운영 가능한 상용 완성도를 기대하는 사람
한 줄 결론
RuView는 허풍만 있는 저장소라기보다, 공식 문서와 릴리스가 실제로 매우 많이 쌓인 공격적인 WiFi sensing 프로젝트에 가깝습니다.
다만 저장소가 가장 인상적으로 보여주는 결과는 Docker 데모가 아니라 CSI-capable hardware 전제 위에서 읽어야 하고, 현재 단계는 분명히 beta입니다.
그래서 지금 시점의 현실적인 평가는 이 정도가 맞습니다.
WiFi 기반 프라이버시 센싱이 왜 다시 주목받는지 보기엔 좋은 프로젝트지만, 일반 사용자가 노트북만으로 바로 “자세·호흡 추적 앱”처럼 쓰는 제품으로 보면 안 됩니다.
출처
- GitHub API:
ruvnet/RuViewrepository metadata
https://api.github.com/repos/ruvnet/RuView - GitHub:
ruvnet/RuView공식 저장소
https://github.com/ruvnet/RuView - GitHub: RuView User Guide
https://github.com/ruvnet/RuView/blob/main/docs/user-guide.md - GitHub: RuView CHANGELOG
https://github.com/ruvnet/RuView/blob/main/CHANGELOG.md - GitHub Releases:
v0.6.3-esp32
https://github.com/ruvnet/RuView/releases/tag/v0.6.3-esp32 - GitHub Releases:
v0.7.0
https://github.com/ruvnet/RuView/releases/tag/v0.7.0 - Cover image: RuView official repository screenshot asset
https://github.com/ruvnet/RuView/blob/main/assets/screenshot.png




{kind=link}
의견 남기기
댓글은 서버 API에 저장되며, 기본 설정에서는 검토 후 공개됩니다.